export coverageWhat is coverage?
Coverage is the amount of geometry area within a bounding box defined by the minimum and maximum x and y-coordinates of that bounding box, or an Extent containing that information.
To provide an example, consider this rectangle:
import GeometryOps as GO
import GeoInterface as GI
using Makie
using CairoMakie
rect = GI.Polygon([[(-1,0), (-1,1), (1,1), (1,0), (-1,0)]])
cell = GI.Polygon([[(0, 0), (0, 2), (2, 2), (2, 0), (0, 0)]])
xmin, xmax, ymin, ymax = 0, 2, 0, 2
f, a, p = poly(collect(GI.getpoint(cell)); axis = (; aspect = DataAspect()))
poly!(collect(GI.getpoint(rect)))
f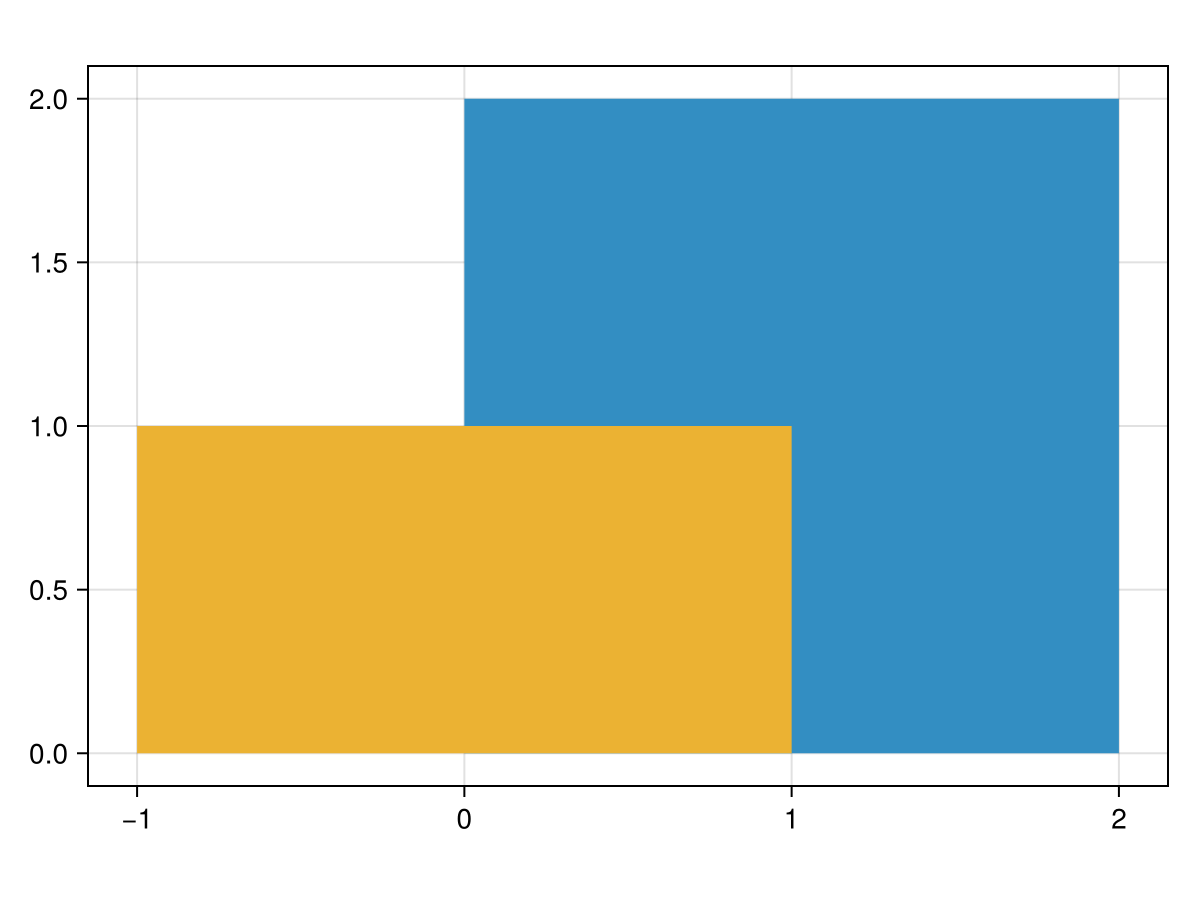
It is clear that half of the polygon is within the cell, so the coverage should be 1.0, half of the area of the rectangle.
GO.coverage(rect, xmin, xmax, ymin, ymax)1.0Implementation
This is the GeoInterface-compatible implementation. First, we implement a wrapper method that dispatches to the correct implementation based on the geometry trait. This is also used in the implementation, since it's a lot less work!
Note that the coverage is zero for all points and curves, even if the curves are closed like with a linear ring.
Targets for applys functions
const _COVERAGE_TARGETS = TraitTarget{Union{GI.PolygonTrait,GI.AbstractCurveTrait,GI.MultiPointTrait,GI.PointTrait}}()Wall types for coverage
const UNKNOWN, NORTH, EAST, SOUTH, WEST = 0:4
"""
coverage(geom, xmin, xmax, ymin, ymax, [T = Float64])::T
Returns the area of intersection between given geometry and grid cell defined by its minimum
and maximum x and y-values. This is computed differently for different geometries:
- The signed area of a point is always zero.
- The signed area of a curve is always zero.
- The signed area of a polygon is calculated by tracing along its edges and switching to the
cell edges if needed.
- The coverage of a geometry collection, multi-geometry, feature collection of
array/iterable is the sum of the coverages of all of the sub-geometries.
Result will be of type T, where T is an optional argument with a default value
of Float64.
"""
function coverage(geom, xmin, xmax, ymin, ymax,::Type{T} = Float64; threaded=false) where T <: AbstractFloat
applyreduce(+, _COVERAGE_TARGETS, geom; threaded, init=zero(T)) do g
_coverage(T, GI.trait(g), g, T(xmin), T(xmax), T(ymin), T(ymax))
end
end
function coverage(geom, cell_ext::Extents.Extent, ::Type{T} = Float64; threaded=false) where T <: AbstractFloat
(xmin, xmax), (ymin, ymax) = values(cell_ext)
return coverage(geom, xmin, xmax, ymin, ymax, T; threaded = threaded)
endPoints, MultiPoints, Curves, MultiCurves
_coverage(::Type{T}, ::GI.AbstractGeometryTrait, geom, xmin, xmax, ymin, ymax; kwargs...) where T = zero(T)Polygons
function _coverage(::Type{T}, ::GI.PolygonTrait, poly, xmin, xmax, ymin, ymax; exact = False()) where T
GI.isempty(poly) && return zero(T)
cov_area = _coverage(T, GI.getexterior(poly), xmin, xmax, ymin, ymax; exact)
cov_area == 0 && return cov_areaRemove hole coverage from total
for hole in GI.gethole(poly)
cov_area -= _coverage(T, hole, xmin, xmax, ymin, ymax; exact)
end
return cov_area
end
#= Calculates the area of the filled ring within the cell defined by corners with (xmin, ymin),
(xmin, ymax), (xmax, ymax), and (xmax, ymin). =#
function _coverage(::Type{T}, ring, xmin, xmax, ymin, ymax; exact) where T
cov_area = zero(T)
unmatched_out_wall, unmatched_out_point = UNKNOWN, (zero(T), zero(T))
unmatched_in_wall, unmatched_in_point = unmatched_out_wall, unmatched_out_pointLoop over edges of polygon
start_idx = 1
for (i, p) in enumerate(GI.getpoint(ring))
if !_point_in_cell(p, xmin, xmax, ymin, ymax)
start_idx = i
break
end
end
ring_cw = isclockwise(ring)
p1 = _tuple_point(GI.getpoint(ring, start_idx), T)Must rotate clockwise for the algorithm to work
point_idx = ring_cw ? Iterators.flatten((start_idx + 1:GI.npoint(ring), 1:start_idx)) :
Iterators.flatten((start_idx - 1:-1:1, GI.npoint(ring):-1:start_idx))
for i in point_idx
p2 = _tuple_point(GI.getpoint(ring, i), T)Determine if edge points are within the cell
p1_in_cell = _point_in_cell(p1, xmin, xmax, ymin, ymax)
p2_in_cell = _point_in_cell(p2, xmin, xmax, ymin, ymax)If entire line segment is inside cell
if p1_in_cell && p2_in_cell
cov_area += _area_component(p1, p2)
p1 = p2
continue
endIf edge passes outside of rectangle, determine which edge segments are added
inter1, inter2 = _line_intersect_cell(T, p1, p2, xmin, xmax, ymin, ymax)Endpoints of segment within the cell and wall they are on if known
(start_wall, start_point), (end_wall, end_point) =
if p1_in_cell
((UNKNOWN, p1), inter1)
elseif p2_in_cell
(inter1, (UNKNOWN, p2))
else
i1_to_p1 = _squared_euclid_distance(T, inter1[2], p1)
i2_to_p1 = _squared_euclid_distance(T, inter2[2], p1)
i1_to_p1 < i2_to_p1 ? (inter1, inter2) : (inter2, inter1)
endAdd edge component
cov_area += _area_component(start_point, end_point)
if start_wall != UNKNOWN # p1 out of cell
if unmatched_out_wall == UNKNOWN
unmatched_in_point = start_point
unmatched_in_wall = start_wall
else
check_point = find_point_on_cell(unmatched_out_point, start_point,
unmatched_out_wall, start_wall,xmin, xmax, ymin, ymax)
if _point_filled_curve_orientation(check_point, ring; in = true, on = false, out = false, exact)
cov_area += connect_edges(T, unmatched_out_point, start_point,
unmatched_out_wall, start_wall,xmin, xmax, ymin, ymax)
else
cov_area += connect_edges(T, unmatched_out_point, unmatched_in_point,
unmatched_out_wall, unmatched_in_wall,xmin, xmax, ymin, ymax)
unmatched_out_wall == UNKNOWN
end
end
end
if end_wall != UNKNOWN # p2 out of cell
unmatched_out_wall, unmatched_out_point = end_wall, end_point
end
p1 = p2
endif unmatched in-point at beginning, close polygon with last out point
if unmatched_in_wall != UNKNOWN
cov_area += connect_edges(T, unmatched_out_point, unmatched_in_point,
unmatched_out_wall, unmatched_in_wall,xmin, xmax, ymin, ymax)
end
cov_area = abs(cov_area) / 2if grid cell is within polygon then the area is grid cell area
if cov_area == 0
if _point_filled_curve_orientation((xmin, ymin), ring; in = true, on = true, out = false, exact)
cov_area = abs((xmax - xmin) * (ymax - ymin))
end
end
return cov_area
endReturns true of the given point is within the bounding box determined by x and y values
_point_in_cell(p, xmin, xmax, ymin, ymax) = xmin <= GI.x(p) <= xmax && ymin <= GI.y(p) <= ymaxReturns true if b is between a and c, exclusive of the maximum value, else false.
_between(b, a, c) = a ≤ b < c || c ≤ b < a
#= Determine intersections of the line from (x1, y1) to (x2, y2) with the bounding box
defined by the minimum and maximum x/y values. Since we are dealing with a single line
segment, we know that there is at maximum two intersection points.
For each intersection point that we find, return the wall that it passes through, as well as
the intersection point itself as a a tuple. If an intersection point isn't found, return the
wall as UNKNOWN and the point as a pair of zeros. =#
function _line_intersect_cell(::Type{T}, (x1, y1), (x2, y2), xmin, xmax, ymin, ymax) where T
Δx, Δy = x2 - x1, y2 - y1
inter1 = (UNKNOWN, (zero(T), zero(T)))
inter2 = inter1
if Δx == 0 # If line is vertical, only consider north and south
if xmin ≤ x1 ≤ xmax
inter1 = _between(ymax, y1, y2) ? (NORTH, (x1, ymax)) : inter1
inter2 = _between(ymin, y1, y2) ? (SOUTH, (x1, ymin)) : inter2
end
elseif Δy == 0 # If line is horizontal, only consider east and west
if ymin ≤ y1 ≤ ymax
inter1 = _between(xmax, x1, x2) ? (EAST, (xmax, y1)) : inter1
inter2 = _between(xmin, x1, x2) ? (WEST, (xmin, y1)) : inter2
end
else # Line is tilted, must consider all edges, but only two can intersect
m = Δy / Δx
b = y1 - m * x1Calculate and check potential intersections
xn = (ymax - b) / m
if xmin ≤ xn ≤ xmax && _between(xn, x1, x2) && _between(ymax, y1, y2)
inter1 = (NORTH, (xn, ymax))
end
xs = (ymin - b) / m
if xmin ≤ xs ≤ xmax && _between(xs, x1, x2) && _between(ymin, y1, y2)
new_intr = (SOUTH, (xs, ymin))
(inter1[1] == UNKNOWN) ? (inter1 = new_intr) : (inter2 = new_intr)
end
ye = m * xmax + b
if ymin ≤ ye ≤ ymax && _between(ye, y1, y2) && _between(xmax, x1, x2)
new_intr = (EAST, (xmax, ye))
(inter1[1] == UNKNOWN) ? (inter1 = new_intr) : (inter2 = new_intr)
end
yw = m * xmin + b
if ymin ≤ yw ≤ ymax && _between(yw, y1, y2) && _between(xmin, x1, x2)
new_intr = (WEST, (xmin, yw))
(inter1[1] == UNKNOWN) ? (inter1 = new_intr) : (inter2 = new_intr)
end
end
if inter1[1] == UNKNOWN # first intersection must be known, if one exists
inter1, inter2 = inter2, inter1
end
return inter1, inter2
endFinds point of cell edge between p1 and p2 given which walls they are on
function find_point_on_cell(p1, p2, wall1, wall2, xmin, xmax, ymin, ymax)
x1, y1 = p1
x2, y2 = p2
mid_point = if wall1 == wall2 && _is_clockwise_from(p1, p2, wall1)
(x1 + x2) / 2, (y1 + y2) / 2
elseif wall1 == NORTH
(xmax, ymax)
elseif wall1 == EAST
(xmax, ymin)
elseif wall1 == SOUTH
(xmin, ymin)
else
(xmin, ymax)
end
return mid_point
end
#= Area component of shoelace formula coming from the distance between point 1 and point 2
along grid cell walls in between the two points. =#
function connect_edges(::Type{T}, p1, p2, wall1, wall2, xmin, xmax, ymin, ymax) where {T}
connect_area = zero(T)
if wall1 == wall2 && _is_clockwise_from(p1, p2, wall1)
connect_area += _area_component(p1, p2)
elseFrom the point to the corner of wall 1
connect_area += _partial_edge_out_area(p1, xmin, xmax, ymin, ymax, wall1)Any intermediate walls (full length)
next_wall, last_wall = wall1 + 1, wall2 - 1
if wall2 > wall1
for wall in next_wall:last_wall
connect_area += _full_edge_area(xmin, xmax, ymin, ymax, wall)
end
else
for wall in Iterators.flatten((next_wall:WEST, NORTH:last_wall))
connect_area += _full_edge_area(xmin, xmax, ymin, ymax, wall)
end
endFrom the corner of wall 2 to the point
connect_area += _partial_edge_in_area(p2, xmin, xmax, ymin, ymax, wall2)
end
return connect_area
endTrue if (x1, y1) is clockwise from (x2, y2) on the same wall
_is_clockwise_from((x1, y1), (x2, y2), wall) = (wall == NORTH && x2 > x1) ||
(wall == EAST && y2 < y1) || (wall == SOUTH && x2 < x1) || (wall == WEST && y2 > y1)
#= Returns the area component of a full edge of the bounding box defined by the min and max
values and the wall. =#
_full_edge_area(xmin, xmax, ymin, ymax, wall) = if wall == NORTH
ymax * (xmin - xmax)
elseif wall == EAST
xmax * (ymin - ymax)
elseif wall == SOUTH
ymin * (xmax - xmin)
else
xmin * (ymax - ymin)
end
#= Returns the area component of part of one wall, from its "starting corner" (going
clockwise) to the point (x2, y2). =#
function _partial_edge_in_area((x2, y2), xmin, xmax, ymin, ymax, wall)
x_wall = (wall == NORTH || wall == WEST) ? xmin : xmax
y_wall = (wall == NORTH || wall == EAST) ? ymax : ymin
return x_wall * y2 - x2 * y_wall
end
#= Returns the area component of part of one wall, from the point (x1, y1) to its
"ending corner" (going clockwise). =#
function _partial_edge_out_area((x1, y1), xmin, xmax, ymin, ymax, wall)
x_wall = (wall == NORTH || wall == EAST) ? xmax : xmin
y_wall = (wall == NORTH || wall == WEST) ? ymax : ymin
return x1 * y_wall - x_wall * y1
endThis page was generated using Literate.jl.